It is composed of two models: one processes text, and the other images
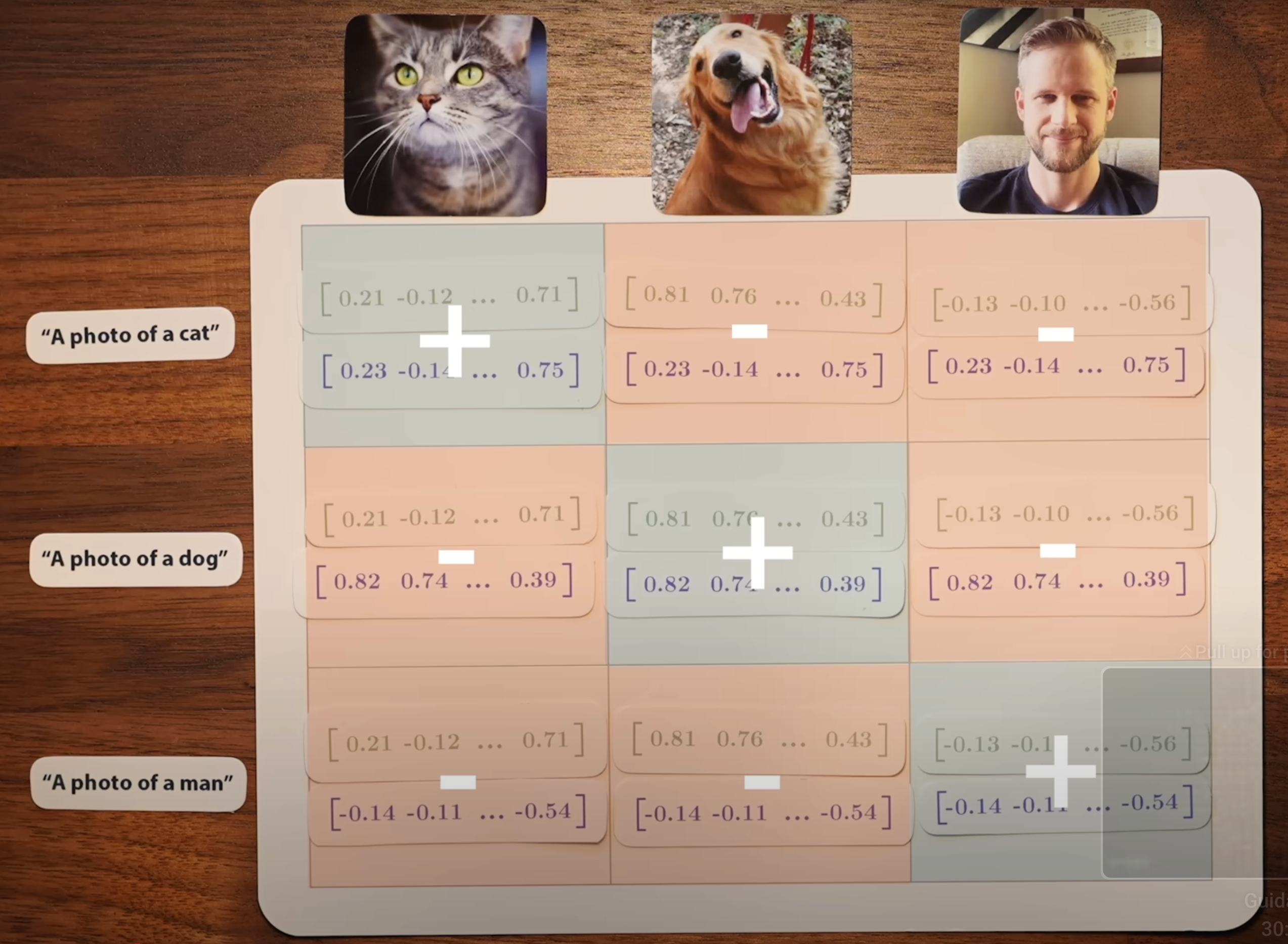
The central idea is that the text encoder and image encoder have similar vectors for an image and its associated caption
To achieve this, they used Contrastive Loss; essentially, the CLIP training objective is to maximize the similarity between matching image-caption-pairs, while minimizing the similarity of mismatched pairs:
Since they measure similarity via Cosine Similarity, the image and text models in CLIP are trained to maximize the alignment between related image-text pairs, while minimizing the angular alignment between unrelated pairs
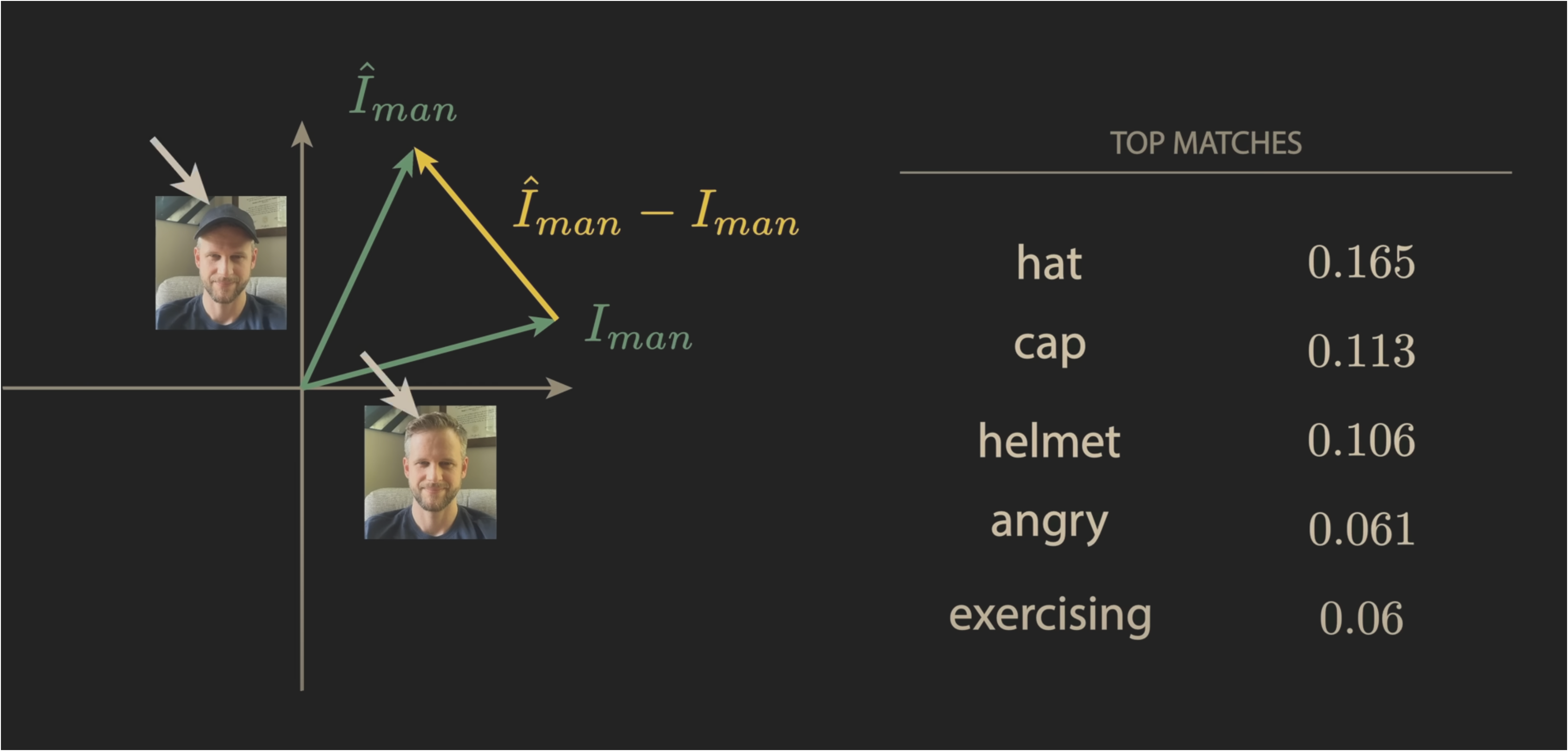
Just like most embedding spaces, this latent space has many interesting properties. For example, when subtracting the vector representations of two images (one of a man with a hat, and one without), the closest matching text embedding for the difference vector are of the words “hat” and “cap”:
However, while the CLIP model can map image and text to a shared embedding space, we have no way of generating images/text from our embedding vectord
Diffusion
With 2020’s breakthroughs in language modelling, a team at Berkeley came out with a paper titled Denoising Diffusion Probabilistic Models (DDPM), showing that it was possible to generate high-quality images with a diffusion process
Essentially, we take a set of training images and add noise step-by-step, until the image is destroyed
Then, we train a neural network to iteratively reverse this process
However, unlike the common perception that diffusion simply reverses the noising process one step at a time, Diffusion models actually operate differently:
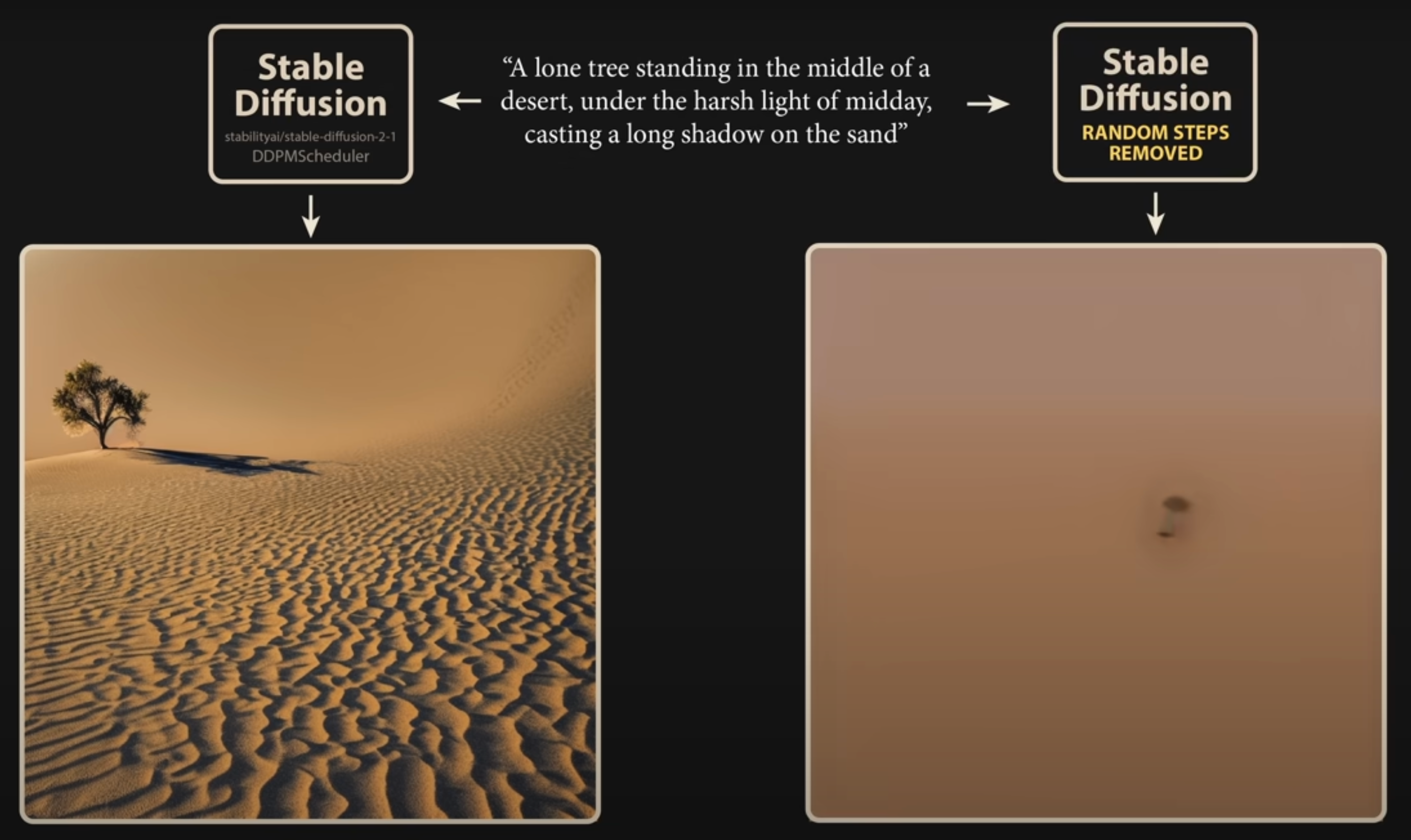
Interestingly, instead of only adding random noise during the training process, we also add random noise to images during image generation (after each step where we predict a less noisy image) before passing it back to the model.
Here on the left is an image with random noise added during each step of the image generation process, and on the right is an image generated without:
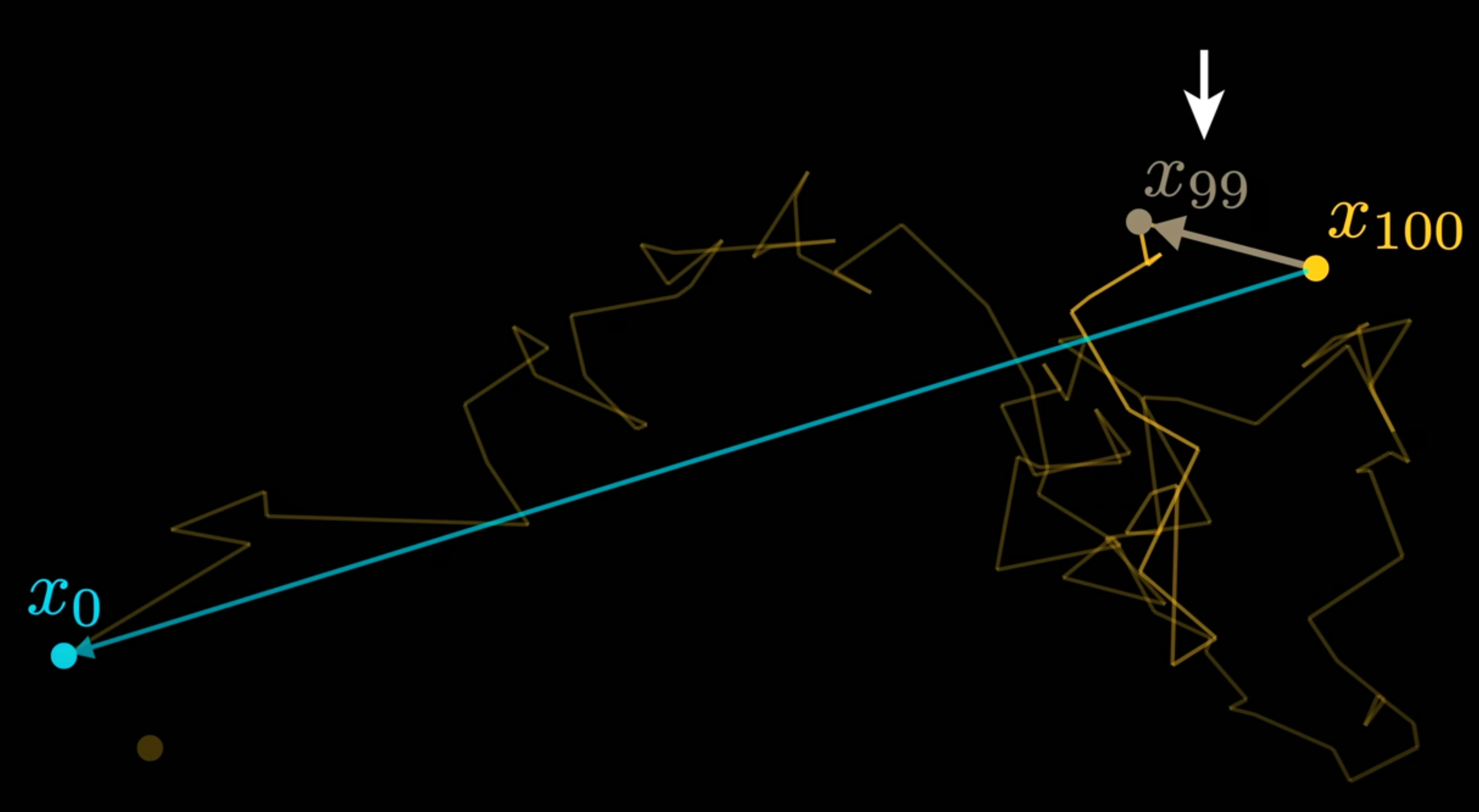
Additionally, in contrast to training models to reverse a single step in the noise-addition process, we take an initial clean image x0 and add scaled random noise ϵ; then, they train the model to predict the total noise that was added to x0
One way to visualize this is through the following image:
Assume that, in the above image, the x0 is the initial position of a vector in our latent representation of the image, and we take a 100 random noise-adding steps that randomly change the position of this vector. It is more straightforward to predict the total noise added across the entire noise-adding process (distance from x100 to x0) instead of predicting each of the 100 individual random de-noising steps